
Extras din referat
1. Structura şi funcţionarea servodirecţiilor. Modelarea matematică a servodirecţiilor
Studiul şi cercetările efectuate în domeniul servodirecţiilor au apărut datorită necesităţii amplificării momentului de virare de la volan la roţi, pentru o mai uşoară manevrabilitate a vehiculelor industriale şi de mare tonaj. Ulterior sistemele de direcţie au fost implementate şi pe automobile, odată cu creşterea cerinţelor asupra nivelului de confort în rulare şi maniabilitate a autovehiculului. Odata cu introducerea pneurilor de joasă presiune pe automobilele de pasageri, a crescut incomod de mult resistenţa la virare, în special în timpul manevrelor de parcare a automobilului. Din aceste considerente, pentru a evita un factor de demultiplicare forte mare între unghiul volanului şi unghiul roţilor directoare, ceea ce ar fi dus la o creştere îngrijorătoare a timpului de răspuns al sistemului de direcţie, au fost necesare găsirea unor noi soluţii. Servomecanismele hidraulice de direcţie reprezintă o soluţionare a acestui inconvenient deoarece conferă sistemului de direcţie forţa necesară pentru o manevrare uşoară şi în acelaşi timp, privind siguranţa în manevrarea automobilului, un factor de demultiplicare îndeajuns de mic.
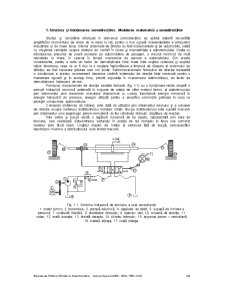
Principial, mecanismele de direcţie asistate hidraulic (fig. 1.1) au o funcţionare relativ simplă: o pompă hidraulică volumică antrenată în mişcare de rotaţie de către motorul termic al autovehiculului prin intermediul unei transmisii mecanice (transmisie cu curea), transformă energia mecanică în energie hidraulică de presiune, energie utilizată pentru a amplifica comenzile şoferului în ceea ce priveşte conducerea automobilului.
Comanda (mărimea de intrare), este dată de utilizator prin intermediul volanului şi a coloanei de direcţie asupra sertarului distribuitorului hidraulic rotativ. Bucşa distribuitorului este cuplată mecanic prin intermediul unui angrenajul pinion-cremalieră de tija cilindrului hidraulic (legătura de reacţie).
Între sertar şi bucşă există o legătură mecanică de tip elastic, reprezentată prin bara de torsiune, care realizează autocentrarea sertarului în poziţia de nul hidraulic în lipsa une comenzi (volanul este lăsat liber). Unghiul maxim de rotaţie al sertarului faţă de bucşă, corespunzător deschiderii maxime a distribuitorului este limitat mecanic.
Fig. 1.1. Schema hidraulică de principiu a unei servodirecţii:
1. motor termic; 2. transmisie; 3. pompă volumică; 4. regulator de debit; 5. supapă de limitare a presiunii; 7. conductă flexibilă; 8. distribuitor hidraulic; 9. rezervor ulei; 10. coloană de direcţie; 11. volan; 12. roată dreapta; 13. bieletă dreapta; 14. cilindru hidraulic; 15. angrenaj pinion – cremalieră; 16. bieletă stânga; 17. roată stânga.
Fig. 1.2. Variaţia fantelor de curgere ale distribuitorului în funcţie de deplasarea relativă dintre sertar şi bucşă
Fig. 1.3. Schema de încercare pentru determinarea amplificării în presiune a distribuitorului hidraulic
Având în vedere schema hidraulică a distribuitorului din figura 1.3, şi ţinând cont de ecuaţiile variaţiei ariei fantelor de curgere (fig. 1.2):
(1.1)
se poate determina expresia caracteristicii de regim staţionar a distribuitoarelor cu acoperire negativă:
(1.2)
Expresia presiunii de alimentare se determină din relaţia:
(1.3)
Pentrul domeniul I de funcţionare (fig. 1.2) considerat critic din punct de vedere al stabilităţii sistemului, prin linearizarea caracteristicii de regim staţionar în jurul nulului hidraulic, se obţine forma liniarizată:
(1.4)
unde
1.5)
Fig. 1.4. Schema de calcul a servodirecţiei
Urmărind schema servodirecţiei din figura, se pot scrie celelate ecuaţii ce constituie modelul matematic:
- ecuaţia de continuitate a subansamblului cilindru hidraulic – distribuitor liniar (1.6)
- ecuaţia de deplasare a pistonului (1.7)
- ecuaţia comparatorului mecanic. (1.8)
2. Simularea numerică a servodirecţiilor
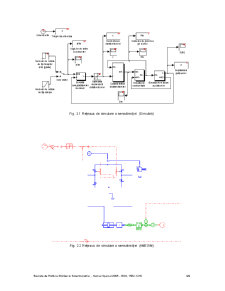
Analiza unui sistem dinamic are ca rezultat concret colectarea de informaţii cu privire la variaţia în timp a valorilor mărimilor sistemului. Realizarea simulării numerice a unui sistem dinamic impune codificarea într-un limbaj de programare a tuturor informaţiilor cu privire la experimentele de simulare necesare. Limbajul de programare utilizat în acest scop poate fi un limbaj universal sau un limbaj specializat, numit limbaj de simulare. Pentru simularea servodirecţiilor s-au folosit două programe diferite din punct de vedere structural, Simulink - MATLAB şi AMESim. Modelele matematice au fost validate şi verificate prin compararea rezultatelor obţinute în cele două medii de simulare.
Preview document







Conținut arhivă zip
- Structura si Functionarea Servodirectiilor Modelarea Matematica a Servodirectiilor.doc
Alții au mai descărcat și

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...