
Cuprins
- 1. Introducere in problematica robotilor;
- 2. Modelarea cinematica/matematica al robotului cu actionare diferentiala;
- 3. Motoare utilizate pentru actionare – caracteristici si principiul de functionare;
- 4. Senzor de proximitate;
- 5. Schema de comanda folosind un microcontroler din familia PIC;
- 6. Bibliografie
Extras din referat
1.Introducere in problematica robotilor
Cuvântul robot provine din limba ceha (robota) şi înseamna muncitor, sau rob.
Provenienta acestui cuvânt este strâns legata de scenaristul Karel Capek, care a introdus acest cuvânt în anul 1921 într-una din scenetele acestuia: R.U.R. (Rossum’s Universal Robots).
Termenul de „robotics” (în traducere libera robotica) se refera la ştiinta care se ocupa de studiul şi utilizarea robotilor. Acest termen a fost prima data folosit de scriitorul şi omul de ştiinta american de origine rusa, Isaac Asimov, într-o scurta povestioara numita “Runaround” în anul 1942. Aceasta poveste scurta a fost apoi inclusa într-o colectie numita “I, Robot”, care a fost publicata în anul 1950.
Primii roboti s-au numit Unimates şi au aparut în anii ’50, fiind dezvoltati de George Devol şi Joe Engelberger. Acesta din urma a format Unimation şi a fost primul care a vândut roboti, fiind considerat de unii ca „parintele roboticii”.
Conform enciclopediei Webster, un robot este “un dispozitiv automat, care executa functii normal atribuite oamenilor, sau o maşina cu asemanare de om”.
În timp ce aceasta definitie ar putea fi satisfacatoare pentru unii dintre noi, nu este însa neaparat şi completa. O alta definitie a fost data de Institutul de Robotica din America, în anul 1979. Conform acestei definitii, un robot este “o maşina reprogramabila, multifunctionala creata pentru a muta diverse materiale, bucati, unelte sau alte dispozitive specializate prin diverse mişcari programate, pentru realizarea unei varietati mari de sarcini”.
Robotul mobil este o maşină având capacităţi de percepţie, de decizie şi de acţiune,ce-i permit să acţioneze într-o manieră autonomă în mediul în care acesta se deplasează, în funcţie de informaţiile primite de la senzori.
Momentan, robotii sunt utilizati în majoritatea industriilor. Exista atât de multe tipuri de roboti folositi pentru diverse servicii, încât o enumerare a tuturor tipurilor acestora ar fi aproape imposibila. O clasificare oarecum rudimentara a celor mai întâlnite tipuri de roboti ar putea fi:
- androizi, roboti construiti ca sa mimeze comportamentul şi înfatişarea umana
- roboti statici, roboti folositi în diverse fabrici şi laboratoare ca de exemplu brate robot
- roboti mobili, roboti care se deplaseaza într-un anumit mediu fara interventie umana şi realizeaza anumite obiective
- roboti autonomi, roboti care îşi îndeplinesc sarcinile fara interventie din partea unui operator uman şi îşi obtin energia necesara functionarii din mediul înconjurator
- tele-roboti, roboti care sunt ghidati prin dispozitive gen telecomanda de un operator uman
- linii automate de productie in fabrici, sunt tot un fel de roboti, chiar daca nu sunt mobili, deoarece au toate facilitatile definitiei noastre.
Un robot mobil ar putea fi descris ca un robot care trebuie sa se deplaseze într-un anumit mediu, fara ajutorul unui operator uman, şi sa execute anumite sarcini date de acesta. Deci principala lui caracteristica este mobilitatea.
Exista un numar important de diferente intre cerintele impuse de robotii industriali (platforme
fixe) si cele impuse de robotii mobili, dintre care pot fi amintite:
- robotii mobili trebuie sa dispuna de un sistem de locomotie, ce depinde de mediul in care se deplaseaza
- modificarea continua a mediului in care opereaza un robot mobil
- robotii mobili trebuie sa fie capabili a cara cu ei toate resursele necesare (sursa de alimentare, sistem senzorial, sistem hard, etc.)
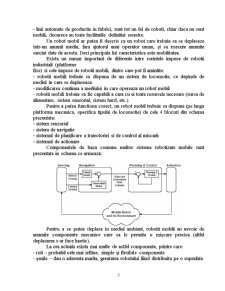
Pentru a putea functiona corect, un robot mobil trebuie sa dispuna (pe langa platforma mecanica, specifica tipului de locomotie) de cele 4 blocuri din schema prezentata:
- sistem senzorial
- sistem de navigatie
- sistemul de planificare a traiectoriei si de control al miscarii
- sistemul de actionare
Componentele de baza comune multor sisteme robotizate mobile sunt prezentate in schema ce urmeaza:
Pentru a se putea deplasa în mediul ambiant, robotii mobili au nevoie de anumite componente mecanice care sa le permita o mişcare precisa (altfel deplasarea s-ar face haotic).
La ora actuala exista mai multe de astfel componente, printre care:
- roti – probabil cele mai ieftine, simple şi flexibile componente
- şenile – dau o aderenta marita, greutatea robotului fiind distribuita pe o suprafata
mai mare
- “picioare” – robotul este sustinut de un numar de picioare, minimum unul
- perne de aer sau perne magnetice
Clasa robotilor mobili cu roti este probabil cea mai populara. Din aceasta clasa fac parte si AGV-urile (Automated Guided Vehicles – vehicole cu ghidare automata).
Robotul ales pentru a realiza acest proiect este un robot cu trei roti fixe, cu actionare sincrona (olonom), dotat cu un senzor de proximitate pentru evitarea obstacolelor.
Roata este, de departe, cel mai popular mecanism de locomotie utilizat in robotica mobila si,in general, in cazul vehiculelor construite de om.
Avantaje ale robotilor cu roti:
– sunt simplu de controlat
– ridica putine probleme de stabilitate
– consum redus de energie pe unitatea de distanta
– viteza de deplasare mai mare decat cea a robotilor pasitori
– manevrabilitate rezonabila
- exista o mare varietate de configuratii
Preview document




















Conținut arhivă zip
- Robot Olonom cu Senzor de Proximitate.doc
Alții au mai descărcat și

1. Introducere Denumirea ROBOT a fost introdusă de către scriitorul ceh Karl Capek în lucrarea sa ,,Roboţii universali ai lui Rossum”,(1921),...

CAPITOLUL I Introducere 1.1.Generalitati 1.1.1. Scurt istoric, definiţii Unul din cele mai importante aspecte în evoluţia fiinţei umane este...

1.Introducere Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

Roboti Industriali 1. Introducere Dezvoltarea exponenţială a sistemelor informatice cât şi a microelectronicii în ultima perioadă, precum şi...

ROBOTI INDUSTRIALI 1. Introducere Este deosebit de dificilă formularea unei definiţii care să cuprindă toate caracteristicile unui robot în...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...