Extras din referat
Argument
Caracteristica de bază a unui sistem robotic este mişcarea robotului în cicluri reprogramabile şi capacitatea acestuia de a schimba, modifica, traiectoria şi punctele esenţiale ale acesteia în conformitate cu modificarea cerinţelor de operare. Aceasta presupune existenţa unor sisteme de conducere flexibile care să asigure generarea unor legi de conducere adecvate si modificarea acestora când este cazul. Implementarea lor necesită fie existenţa unui sistem de programare, cu programe realizate off-line, fie a unui sistem de instruire specific. În ambele cazuri va fi necesară introducerea unei memorii care să asigure informaţia de control corespunzătoare
Deci, aceste sisteme trebuie să fie dotate cu o memorie de dimensiuni adecvate şi cu o structură hardware şi software de control a acesteia.
Roboţii generaţiilor recente sunt dotaţi cu structuri ierarhizate de conducere ceea ce asigură o comportare adecvată la schimbările mediului de lucru. Aceasta impune fie existenţa unui calculator puternic care să acopere întregul sistem de conducere, fie a unor procesoare specializate ataşate fiecărui nivel ierarhic. Ultima soluţie este de cele mai multe ori preferabilă, atât în ceea ce priveşte flexibilitatea de ansamblu a configuraţiei, cât şi sub raport economic.
Roboţii actuali au în general un câmp de aplicaţie bine conturat, acesta fiind definit de structura mecanică existentă şi, în special, de specificul sistemului de calcul şi al programelor utilizate. Astfel, un robot destinat unor operaţii de vopsire trebuie să fie echipat cu un sistem hardware - software care să-i permită programarea prin instruire a traiectoriilor de mişcare, pe când un robot utilizat în operaţii de asamblare cuprinde un sistem de măsurare şi senzorial de înaltă calitate pentru a asigura conducerea compliantă adecvată.
Complexitatea structurilor mecanice într-o serie de roboţi industriali, a sistemelor senzoriale precum şi gradul ridicat de dificultate al operaţiilor tehnologice conexe necesită sisteme de conducere cu rezerve hardware şi software suficiente, care să acopere cerinţele impuse de regimurile specifice în care operează aceste sisteme. Una din soluţiile cele mai curent utilizate în această direcţie constă în implementarea sistemului de conducere pe o structură bazată pe microprocesoare.
Microprocesorul acoperă relativ uşor cerinţele specificate mai sus şi asigură în acelaşi timp o flexibilitate deosebită a domeniului de utilizare, o fiabilitate ridicată şi, nu în ultimul rând, o soluţie economică în general unanim acceptabilă.
Soluţiile hardware implicate în orice sistem de conducere cu micrprocesor pot fi grupate în două clase mari: arhitecturi microprocesor şi arhitecturi multiprocesor.
Într-o structură multiprocesor, fiecărei axe de mişcare i se asociază câte un procesor împreună cu modulele de interfaţă auxiliare către dispozitivul de acţionare şi către sistemul de traductoare de deplasare. Un procesor specializat coordonează şi supervizează întregul proces, acesta asumându-şi, în acelaşi timp, o serie de sarcini ce nu pot fi distribuite procesoarelor locale.
Această distribuţie a funcţiilor de conducere între câteva procesoare are, în primul rând, avantajul unei distribuţii a efortului de calcul care, într-o conducere în timp real, este întotdeauna prioritar.Această soluţie va fi, deci, recomandabilă în sistemele mai lente, cu un set de instrucţiuni redus, şi cu timpi de prelucrare mari.
Dacă procesoarele utilizate sunt microprocesoare pe 16 sau 32 biţi cu o prelucrare rapidă de informaţie şi care conţin un set bogat de instrucţiuni, atunci o arhitectură de tip multiprocesor nu este recomandată, întregul sistem de conducere putând fi acoperit cu un singuur procesor.
Capitolul I
Structura de baza a robotilor industriali
1.1.Structura robotului
Indiferent de tipul arhitecturii utilizate, o caracteristică de bază a acesteia este modularitatea. Această modularitate trebuie privită sub două aspecte:
• Modularitate funcţională ce reflectă tendinţa sistemului de a rămâne constant (ca structură) pentru orice extindere solicitată. Astfel, dacă se doreşte introducerea unei bucle de conducere pentru încă o axă de mişcare, aceasta implică integrarea unui set nou de funcţii (hardware şi software) fără a modifica structura existentă.
• Modularitatea fizică indică integrarea uneia sau a mai multor unităţi fizice într-o singură unitate funcţională. Această organizare oferă avantaje deosebite în fazele de proiectare şi de explorare ale echipamentului.
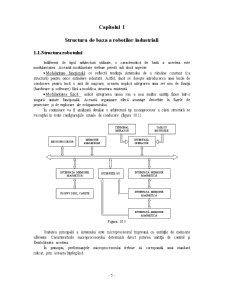
În continuare va fi analizată detaliat o arhitectură tip monoprocesor a cărei structură se va regăsi în toate configuraţiile uzuale de conducere (figura 10.1).
Preview document

















Conținut arhivă zip
- Automate Programabile.doc
Alții au mai descărcat și

Baze de date multimedia Definirea conceptelor. Aplicatii. Data base - baza de date - este un grup de fisiere în care este înregistrata o multime...

Aplicatii client server Studiu de caz- Solutie de gestiune a Resurselor Umane si Salarizarii Solutiile de gestiune economica Mobius, sunt...

RETELE WIRELESS Introducere Cresterea popularitatii retelelor wireless a determinat o scadere rapida a pretului echipamentelor wireless...

“Feedback-ul este ceea ce lipsea din stiinta, in afara lui Newton”, spunea omul de stiinta britanic Steve Grand. “Noi credeam ca este un fenomen...

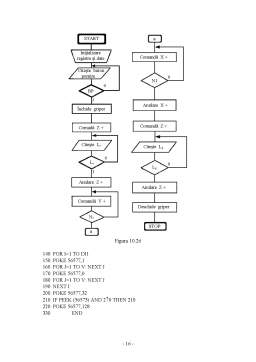
Programul realizeaza determinarea procesului de incalzire ,respectiv racire intr-o camera si a timpului (maxim respectiv minim) in functie de trei...

I. INTRODUCERE Dezvoltarea ştiinţei a demonstrat că cele mai spectaculoase progrese se obţin prin cercetare pluridisciplinară, situată la graniţa...

Scheme Hidraulice Prima schema Hidraulica este in figura 1: Figura 1 A doua schema hidraulica este in figura 2 : Figura 2 A treia schema...
Te-ar putea interesa și

I. PARTEA TEORETICA 1. Automate programabile 1.1 Introducere Sistemele automate de control a proceselor sunt un conglomerat de dispozitive...

PARTEA I Capitolul 1. Usi de garaj automate 1.1. Generalitãti Portile si usile de intrare în curte sau în garaj automatizate reprezintã solutia...

I. Partea teoretica 1. Programatoare pentru centrala termica 1.1 Programator Un programator se utilizeaza in instalatii de incalzire pentru...

INTRODUCERE Modernizarea sistemului de securitate al maşinii de rectificat feţe bielă - Giustina Lucrarea de disertaţie realizată în cadrul...

Argument Automatizarea este definitã ca ştiinţa care se ocupã cu comanda şi controlul sistemelor.Un sistem este o noţiune abstractã ,care poate fi...

1. Controller Programabil Logic (PLC) 1.1. Introducere Ingineria controlată a evoluat de-a lungul timpului. Cândva, în trecut, oamenii erau...

CAPITOLUL 1. GENERALITĂŢI PRIVIND AUTOMATELE PROGRAMABILE 1.1.Definiţii şi caracteristici. Automatele programabile sau PLC-urile sunt...

Introducere Simularea evenimentelor discrete este o abordare foarte bună în ceea ce privește modelarea unui sistem real și pentru a-i reproduce...