Extras din referat
1. Introducere
Sistemele de stabilizare/urmărire își găsesc aplicații în cele mai variate domenii tehnice, militare, medicale, meteorologice etc.
Structura acestor sisteme este deja cunoscută, elementele constructive ajungând la un grad de performanțe, pe baza unor modernizări tehnologice evidente. Se remarcă sisteme tot mai rapide, caracterizate de constante de timp tot mai reduse și de frecvențe proprii ridicate. Prin reducerea frecărilor interne se ajunge la sisteme echivalente de ordinul doi, cu coeficienți de amortizare reduși, așa încât apariția unor regimuri oscilante slab amortizate este evidentă.
Domeniul unde există încă posibilități largi de evoluție și dezvoltare este cel al controlului automat bazat pe concepte și metode moderne, avansate din teoria reglării automate. În acest sens, prezentil referat, după o scurtă prezentare a unor sisteme militare de stabilizare/urmărire sunt prezentate câteva strategii avansate de control. Se face apel la reglarea robustă în condițiile unor încertitudini parametrice, respectiv la aplicarea unor variante de control adaptiv. În final se combină aceste metode sub forma unui control adaptiv robust.
2. Asupra necesității și oportunității evoluției controlului sistemelor de stabilizare/urmărire
2.1. Structura și performanțele impuse unui sistem de stabilizare cu destinatie militară
Eficacitatea echipamentelor de pe vehiculele militare terestre este mult mai ridicată dacă acestea sunt in repaus, dar in multe situații acestea trebuie să acționeze din mișcare. Datorită neregularităților inerente ale terenului, întreg vehicolul, și odată cu acesta, echipamentele aferente se mișcă necontrolat, haotic. Este necesară menținerea constantă a poziției elementelor principale ale echipamentelor de pe vehicul, indiferent de mișcările necontrolate ale acestuia.
În cazul unui tun este necesară stabilizarea poziției țevii acestuia, atât în plan orizontal cât și în plan vertical.
Cele două sisteme convenționale de stabilizare funcționează independent și sunt concepute și proiectate pentru diferite nivele de performanță. Stabilizarea în plan orizontal este supusă unor perturbații într-o gamă mai joasă de frecvențe astfel că întreg sistemul de stabilizare este mai lent, pe când sistemul de stabilizare verticală este mult mai rapid.
În funcție de situațiile concrete de pe teren, sunt stabilite de către utilizatori referințele pentru cele două sisteme, iar menținerea acestora de realizate de un bloc giroscopic cu orientare pe două axe rectangulare. Mărimile de referință reale pentru cele două sisteme sunt de fapt deviații impuse față de referințele „rigide” stabilite de blocul giroscopic. Schema unui giroscop cu două grade de libertate este dată în figura 2.1.
Fig. 2.1 Schema giroscopului cu două grade de libertate
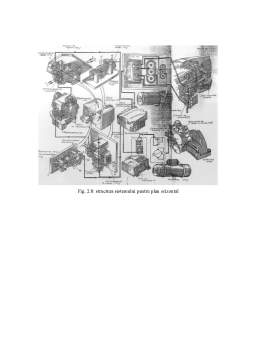
O mașină electrică specială, denumită uzual transformator rotitor, figura 2.2, pentru generarea referinței reale, sub forma unui semnal de tensiune dar si sesizarea vitezei cu care se amplifică referința.
Bibliografie
[1] Y. Dote, Servo Motor and Motion Control Uding Digital Signal Processors, Englewood Cliffs, NJ: Prentice Hall, April 1990.
[2] Y. Dote, ‘Application of Modern Control Technique to Motor Control’, Proc. Of IEEE, 76, no.2, 1998.
[3] Y. Dote, ‘Fuzzy and Neural Network Controller’, Proc. Second Workshop or Neural Networks, Academy|Industrial|NASA|Defense, Computer simulation society, Auburn University, USA, Ref. 1991.
[4] Y. Dote and M. Futami, ‘Comparison of Sliding Mode Control and Fuzzy Control for Two Level Water Tanks’, Proc. IECON, San Francisco, Nov. 1985.
[5] Y. Dote, ‘Stability Analysis of Variable-Structured PI Controller for Servomotor’, Proc. CDC, Brighton, UK, Dec. 1991.
[6] M. Streffeza and Y. Dote, ‘Neural Network and Fuzzy Position Control for Servomotor’, Proc. Of IEEE International Symposium on IE, Xian, China, May 1992.
[7] I. Takashashi and T. Noguchi, ‘A New Quick Response and High Efficiency Control Strategy of an Induction Motor’, IEEE Trans. on Ind. Application’ IA-22, 1986.
[8] I. Horowitz, Synthesis of Feedback System, New York: Academic Press, 1963.
Preview document
























































Conținut arhivă zip
- Posibilitati si solutii pentru controlul evoluat al sistemelor de stabilizare-urmarire.doc
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Cap.I. Definiții și particularități ale sistemelor de urmărire I.1. Noțiuni introductive Sistem de urmărire = sistem de control al poziției,...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...