
Cuprins
- Cap.I. Definiții și particularități ale sistemelor de urmărire 3
- I.1. Noțiuni introductive 3
- I.2. Principalele elemente componente ale sistemelor de urmărire 5
- I.2.1. Alegerea elementelor principale ale sistemelor de urmărire si determinarea unor parametric ai acestora 5
- I.2.1.1.Alegerea surselor de alimentare 5
- I.2.1.2.Alegerea rapoartelor de transmitere si a tipului transmisiilor mecanice 5
- I.2.1.3.Alegerea puterii motorului de execuție 6
- I.2.1.4.Determinarea funcției de transfer a motorului 6
- I.2.1.5.Alegerea elementului sensibil 6
- I.2.1.6.Alegerea dispozitivelor auxiliare ale sistemelor de urmărire 7
- I.2.2.Amplificatoare pentru sisteme de urmărire 7
- I.2.2.1. Alegerea tipului de amplificator 7
- I.2.3.Dispozitive de corecție 11
- I.2.Tipuri de sisteme de urmărire 13
- I.2.1.Sisteme de urmărire electrice de putere mica cu acțiune continua, de curent continuu 13
- I.2.2.Sisteme de urmărire în curent alternativ 15
- I.2.3. Sisteme de urmărire sincrone de forță 17
- I.2.3.1.Sisteme de urmărire sincrone de forță cu motoare electrice de curent continuu 17
- I.2.3.2.Sisteme de urmărire sincrone de forță cu motoare hidraulice si pneumatice 17
- (Sisteme de urmărire electrohidraulice si electropneumatice cu acțiune continuă) 17
- I.3. Date utile de proiectare 18
- I.3.1.Performanțe (în fct. de metoda de calcul) 18
- I.3.2.Semnalul de comanda si condiții inițiale 19
- I.3.3.Succesiunea calculului sistemelor de urmărire 19
- I.3.4. Condiții tehnice care trebuie prescrise la proiectarea sistemelor de urmărire 19
- Cap.II. Particularități și detalii ale sistemelor de urmarire electrice 21
- II.1. Sisteme de urmarire de putere mica cu actiune continua 27
- II.2. Sisteme de urmarire in curent alternativ 28
- II.3. Sisteme de urmarire de forta 29
- II.4. Sisteme de urmarire electrohidraulice si electropneumatice cu actiune continua 30
- Cap. III. Aplicarea metodelor de analiză și proiectare ale sistemelor de urmărire la dirijarea rachetei 35
- Bibliografie 47
Extras din referat
Cap.I. Definiții și particularități ale sistemelor de urmărire
I.1. Noțiuni introductive
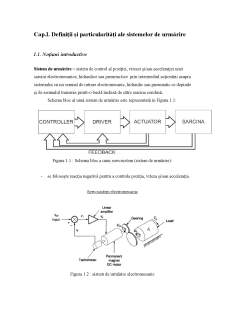
Sistem de urmărire = sistem de control al poziției, vitezei și/sau accelerației unei sarcini electromecanice, hidraulice sau pneuma-tice prin intermediul acționării asupra sistemului cu un semnal de intrare electromecanic, hidraulic sau pneumatic ce depinde și de semnalul transmis printr-o buclă închisă de către sarcina condusă.
Schema bloc al unui sistem de urmărire este reprezentată in Figura 1.1:
Figura 1.1 : Schema bloc a unui servosistem (sistem de urmărire):
- se folosește reacția negativă pentru a controla poziția, viteza și/sau accelerația.
Servosistem electromecanic
Figura 1.2 : sistem de urmărire electromecanic
Vi = Vref - Vf;
Vf = Kf*Ωm;
Va = Ka*Vi;
Figura 3 : sistem de urmărire electromecanic
Figura 1.4 : locul rădăcinilor pentru un servosistem hidraulic
I.2. Principalele elemente componente ale sistemelor de urmărire
I.2.1. Alegerea elementelor principale ale sistemelor de urmărire si determinarea unor parametric ai acestora
I.2.1.1.Alegerea surselor de alimentare
-tendința spre utilizarea sistemelor de urmărire de curent alternativ cu motoare asincrone mai ieftine si mai simple (avantaj - posibilitatea creării unor sisteme de urmărire fără contacte și prin urmare sigure, posedând facilități de exploatare bune si care practic nu necesita întreținere; dezavantaj - limitare la putere de câteva sute de watti);
-trebuie sa se evite pe cat posibil transformările de curent, ceea ce duce la o creștere a cheltuielilor inițiale si de exploatare;
-pentru sisteme de urmărire, in special pentru mai multe sisteme interdependente, este indicat sa se folosească surse de curent monofazat, in locul celor trifazate.
I.2.1.2.Alegerea rapoartelor de transmitere si a tipului transmisiilor mecanice
-calculul reductorului pentru sistemul de urmărire este in principiu analog cu calculul reductoarelor obișnuite, insa au anumite particularități:
-folosirea transmisiilor fără autofrânare (mai ales cilindrice cu dinți drepți) pentru a evita griparea lor la inversare;
-inadmisibilitatea jocurilor mari, care îngreunează stabilizarea sistemului de urmărire si provoacă erorile suplimentare (jocurile transmisiilor mecanice nu trebuie sa depășească jumătate din valoarea erorii statice admisibile)
-necesitatea considerării momentelor de inerție ale perechilor cinematice ale transmisiei pentru asigurarea momentului de inerție minim redus la arborele motorului de execuție al transmisiei in ansamblu;
-asigurarea frecării mici in angrenaj pentru funcționarea lina a sistemului la viteze mici;
I.2.1.3.Alegerea puterii motorului de execuție
-la baza metodicei este situata alegerea motorului după cuplul de suprasarcina cu verificarea ulterioara a încălzirii motorului;
I.2.1.4.Determinarea funcției de transfer a motorului
-motoare care au o răspândire largă in sistemele de urmărire:
-motor de curent continuu cu excitație independenta;
-motor de curent alternativ asincron bifazat;
I.2.1.5.Alegerea elementului sensibil
Elementele sensibile ale sistemelor de urmărire sunt destinate pentru măsurarea dezacordului dintre pozițiile arborilor de comanda si de execuție și trebuie să asigure:
-erori proprii mici (substanțial mai mici decât erorile întregului sistem în ansamblu);
-liniaritatea caracteristicilor elementelor in gama de lucru;
-inerție mică;
-nivelul scăzut al perturbațiilor create de elementele sensibile;
-consum redus de energie;
-valori minime ale componentelor armonice si de cuadratura ale tensiunii pentru elementele sensibile de curent alternativ;
-un cuplu propriu de frecare mic in scopul reducerii la maxim a sarcinii pe axul pivot;
-calități de exploatare înaltă: siguranță mare, durată îndelungata de serviciu etc.;
In sistemele cu conducere continua își găsesc aplicare următoarele tipuri de elemente sensibile:
1.) cu contact: dispozitive potențiometrice, tahogeneratoare (tahogenerator = tahometru electric = instrument de măsură alcătuit dintr-un mic generator electric și dintr-un voltmetru electric, a cărui scală e gradată în unități de viteză unghiulară sau de turație) de curent continuu etc.;
2.) de inducție: dispozitive de tipul transformatorului rotativ, selsinurile ( selsin = mașină electrică mică folosită ca traductor pentru transmiterea la distanță a deplasărilor unghiulare ale unor organe de mașină ) cu contacte si fără contacte, traductoare diferențiale tip transformator, tahogeneratoare asincrone, dispozitive de construcții si destinații speciale (giroscoape etc.);
3.) capacitive, fotoelectrice si elemente folosind izotopi radioactivi.
I.2.1.6.Alegerea dispozitivelor auxiliare ale sistemelor de urmărire
Dispozitive auxiliare:
-redresoare sensibile la faza;
-scheme de adaptare automata;
-scheme de reglare automata a amplificării;
Bibliografie
1. I. Dumitrache, Ingineria Reglarii Automate, Bucuresti, 2007
2. I. Vasiliev s.a., Calculul si proiectarea sistemelor de urmarire, Editura Tehnica, București, 1966
3. V.V. Solodovnicov, Regulatoare automate și sisteme de urmărire, Editura Tehnică București, 1975
4. I. Ștefan s.a., Racheta dirijată, Editura Militară, București, 1984
Preview document













































Conținut arhivă zip
- Analiza stadiului actual al evolutiei si perspectivele sistemelor automate de stabilizare-urmarire.doc
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

1. Introducere Sistemele de stabilizare/urmărire își găsesc aplicații în cele mai variate domenii tehnice, militare, medicale, meteorologice etc....

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

INTRODUCERE Teza de doctorat conține o introducere și este structurată pe 6 capitole în care am prezentat modelele fenomenelor meteorologice care...